Company/Client
Cooper Union Senior Capstone
Role
Capstone Project Lead
Timeline
2022 - 2023
Skills
Engineering Design Process Mechanical Testing Electronic Enclosure Design Rapid Prototyping
Tools
SolidWorks 3D Printing CNC Drones

Overview
For my senior capstone, I designed and built an electric vertical take-off and landing (eVTOL) drone with exceptional speed, maneuverability, and autonomous navigation. We participated in the 2022-2023 VFS Design-Build-Vertical Flight Competition that explores VTOL technologies due to its high payload capacity and flexibility in difficult-to-access areas or emergency situations. We were awarded Best Technical Report, which you can view here.
Ideation
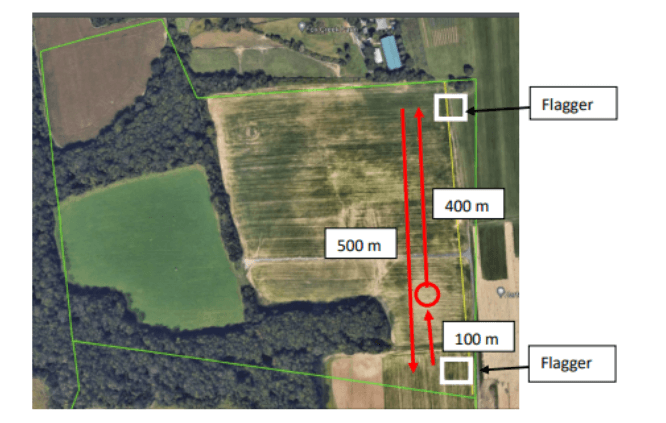
The competition course sets the design requirements: the drone needs to vertically take-off, transition to forward flight, travel 400m, turn around, travel 500m, turn around, travel 100m back to the landing zone, and land vertically. Additionally, the drone must carry as many 2-lb payloads as possible for additional points. Lastly, it must be able to perform the course autonomously.

Since there are so many drone configurations to choose from, I created a weighted matrix to determine the best one for this competition and my team, factoring criteria like speed, forward flight performance, simplicity, and manufacturability.
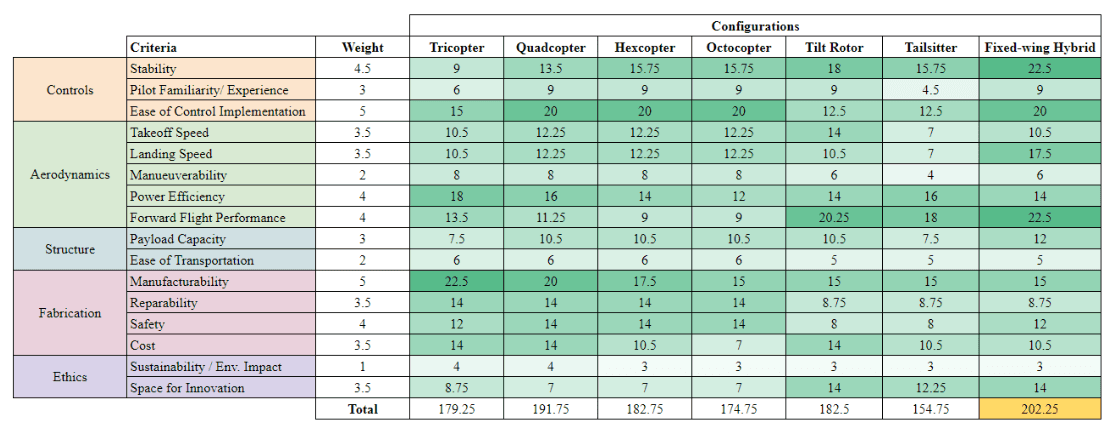
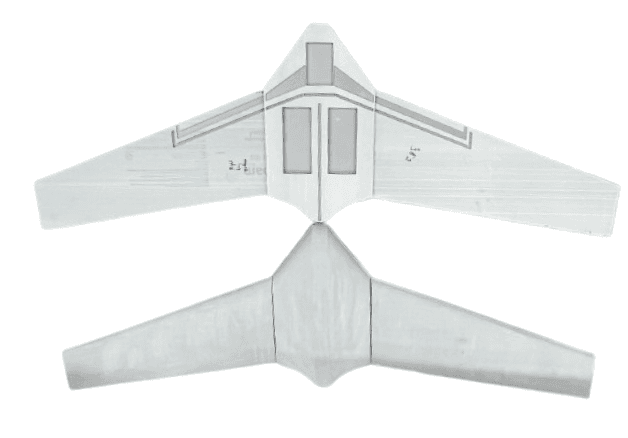
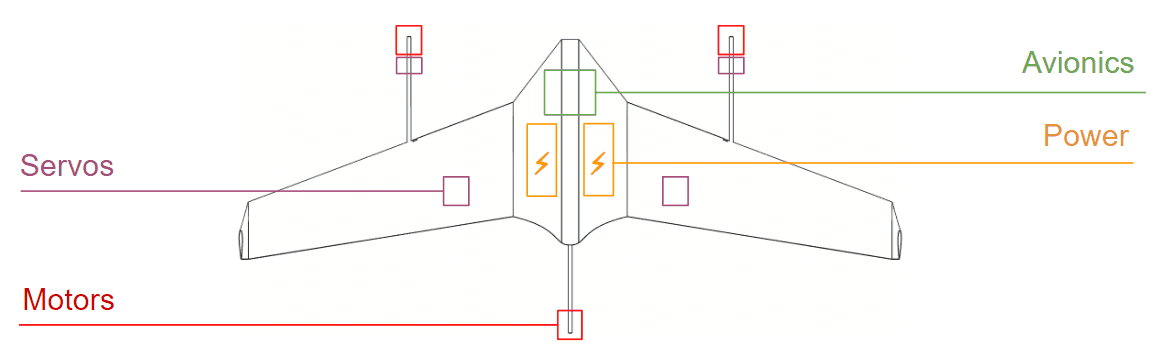
Ultimately, I decided to move forward with a fixed-wing hybrid design due to its superior forward flight performance, as airfoils can provide lift and reduce power usage. Additionally, this offers the stability and flexibility of a multicopter with the aerodynamics of an airplane. Specifically, the drone my team and I designed is tilt-rotor tricopter blended wing design.
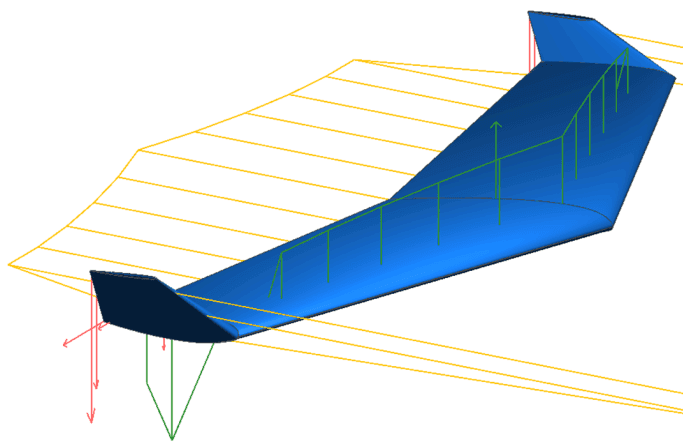
Mechanical Design
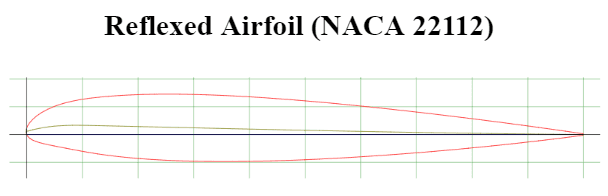
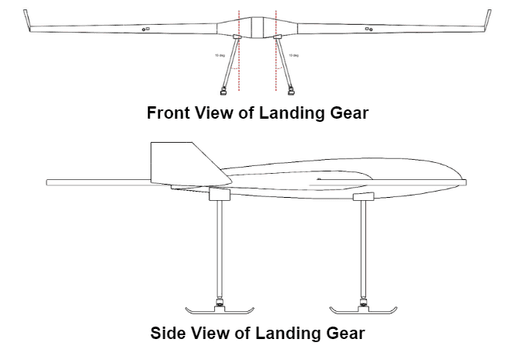
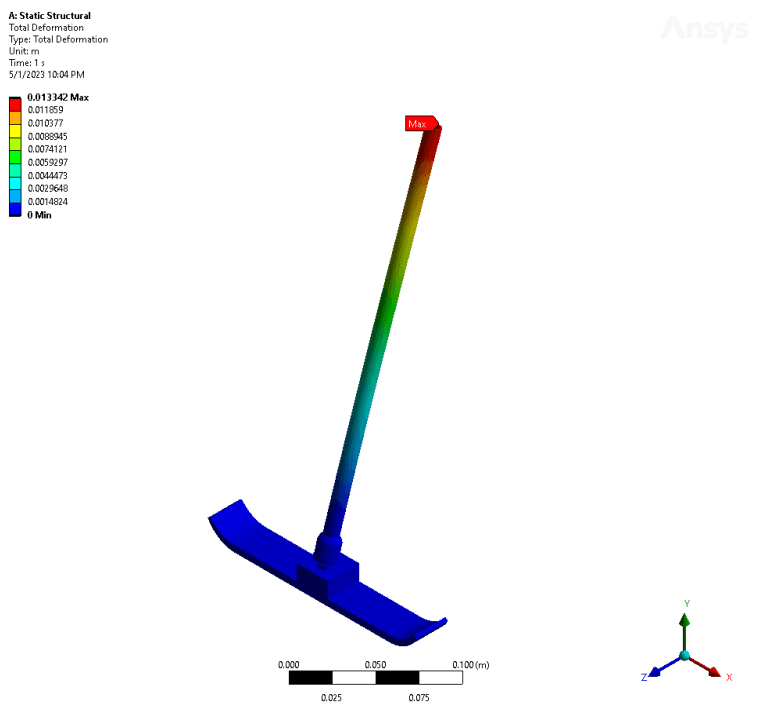
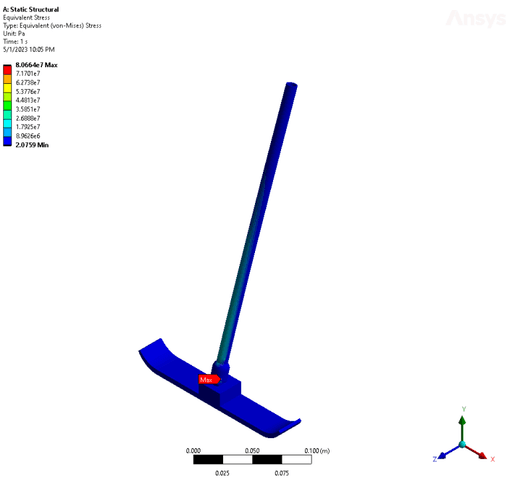
The motivation for the competition is to encourage innovation in the eVTOL field. Therefore, I looked to integrate an inventive wing and landing gear design, featuring a reflexed airfoil and terrain adaptive landing gear.
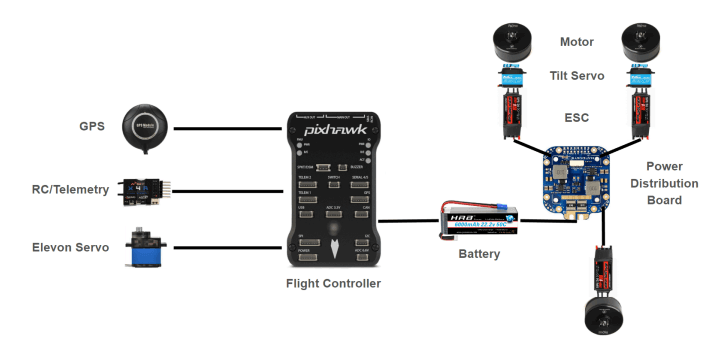
Controls
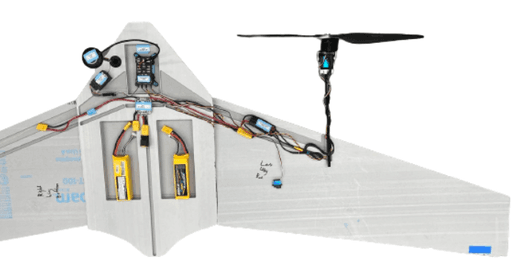
In order to control and interface with the drone, I designed the aircraft’s controls system to sense, control, and communicate data. The aircraft must be capable of measuring orientation and speed using a GPS module, controlling the motors using electronic speed controllers (ESCs), and controlling signals during manual or autonomous flight using a flight controller. A PixHawk 2.4.8 is paired with
QGroundControl, an open source autopilot software, implementing a VTOL tricopter tilt-rotor control system on the aircraft is simplified with the built-in framework and commands.
Motor Selection
Next, I conducted a thorough analysis of existing motors and compared them based on the drone's maximum take-off weight (MTOW) of about 20 lb. I found lift motors between 100-1000 KV for large drone sizes at a comparable scale, because lower KV values deliver greater torque, as opposed to motors with higher KV values, which are suited for smaller drones. The thrust required to hover in a tricopter configuration is approximately 3024g per motor, meaning the selected motors must exhibit at least 3000g of thrust at 50-55% throttle, to allow room for a higher thrust-to-weight ratio while ensuring hover at fairly low throttle. Additionally, the selected motor must only be rated for 6S batteries or lower, following the competition requirements. The selected motor was determined to be the T-Motor P60.
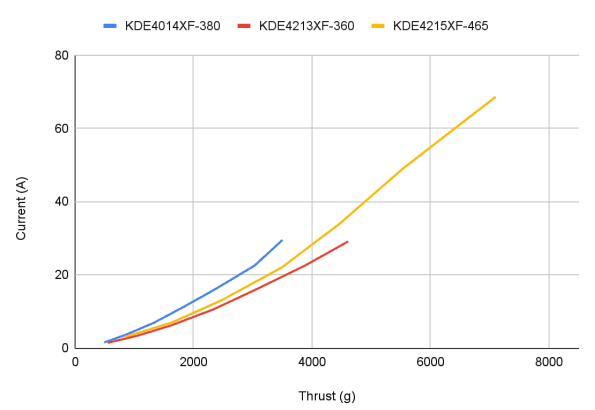
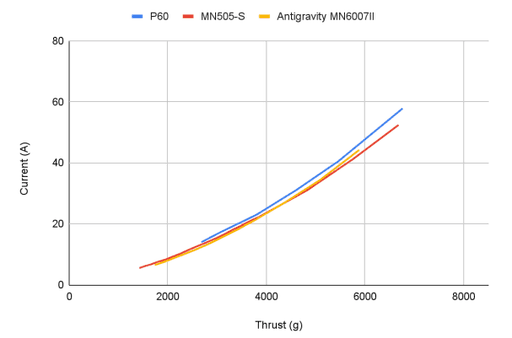
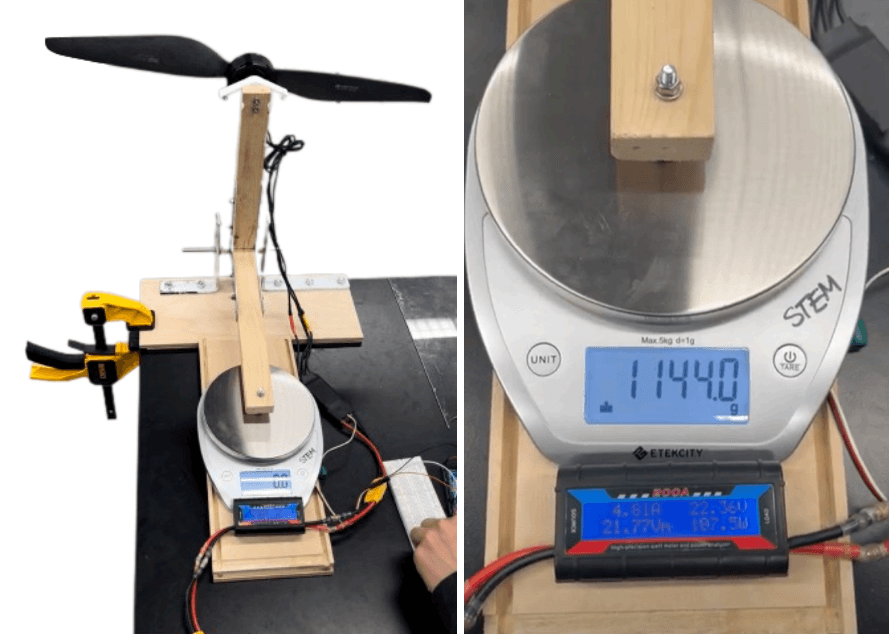
Thrust Testing
To validate the information given from the manufacturer, a simple thrust test stand was constructed using a wooden frame, motor mount, and weight scale. By varying current flow to the ESCs and attaching a wattmeter, the motor behavior due to the current and power supplied can be analyzed.

Fabrication
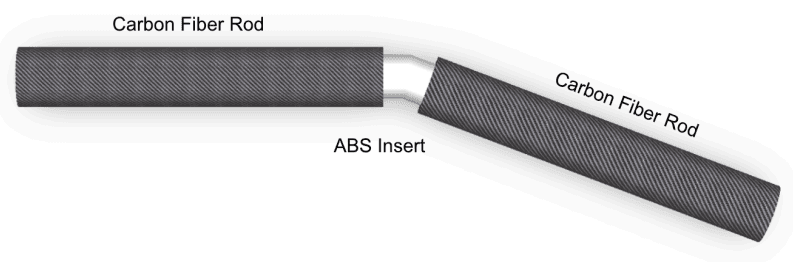
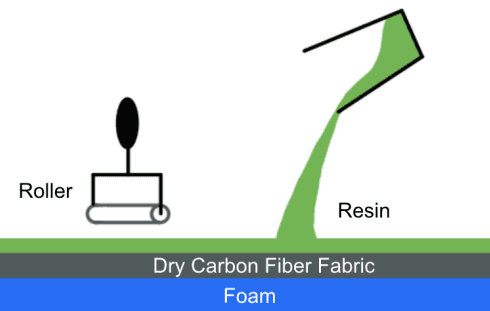
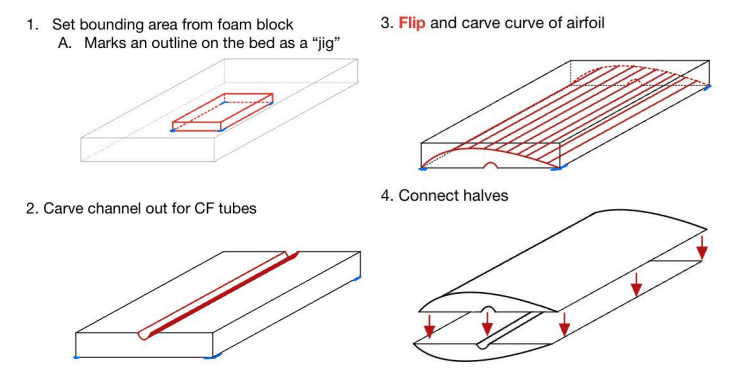
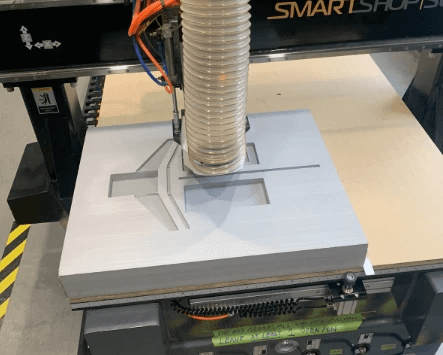
For the frame, carbon fiber rods were joined at angles using ABS inserts and epoxy resin. The foam body is CNC machined using a 4-step process to precisely shape two airfoil halves with an inner tube slot. Lastly, the landing gear were made using carbon fiber rods and recycled PLA skids from my other project, the Recycled PLA Center.